FitToHeightMap
vtk-examples/Cxx/Meshes/FitToHeightMap
Description¶
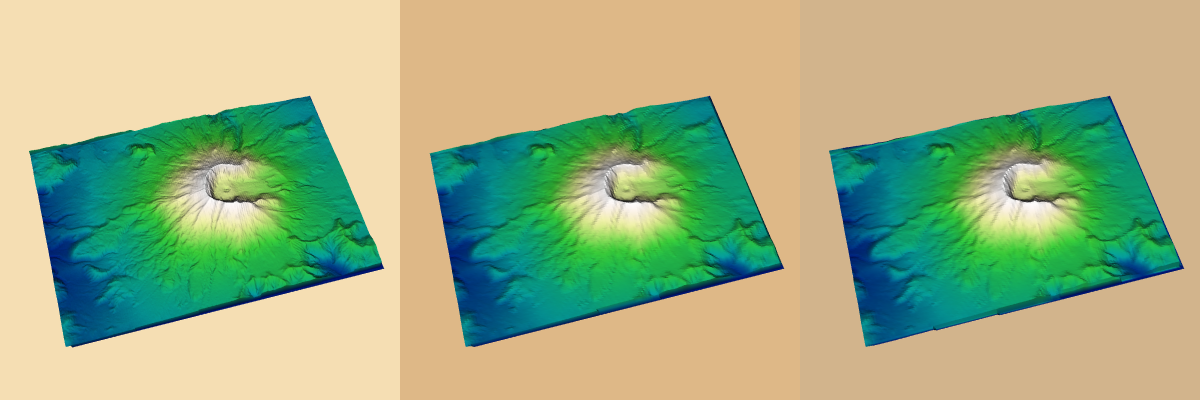
This example uses vtkFitToHeightMapFilter to cover a height map with vtkPolyData generated by a vtkPlaneSource. The plane's origin, point1 and point2 are calculated from the DEM's bounding box. The z coordinate of each parameter is set to the height of the DEM. With this plane, the example uses vtkProbeFilter to apply the scalar elevation data from the DEM.
vtkWarpScalar is used to "elevate" the DEM mesh. Once the planes are draped over the warped DEM mesh, they are displayed side-by-side using the same vtkLookupTable.
The displayed meshes are original (left), point fit (middle) and cell fit (right).
Note
DEM files for the United States are available here.
Info
This example requires vtk version 8.2 or newer.
Question
If you have a question about this example, please use the VTK Discourse Forum
Code¶
FitToHeightMap.cxx
#include <vtkActor.h>
#include <vtkCamera.h>
#include <vtkDEMReader.h>
#include <vtkFitToHeightMapFilter.h>
#include <vtkImageData.h>
#include <vtkImageDataGeometryFilter.h>
#include <vtkLookupTable.h>
#include <vtkNamedColors.h>
#include <vtkNew.h>
#include <vtkPlaneSource.h>
#include <vtkPolyDataMapper.h>
#include <vtkProbeFilter.h>
#include <vtkProperty.h>
#include <vtkRenderWindow.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkRenderer.h>
#include <vtkWarpScalar.h>
int main(int argc, char* argv[])
{
if (argc < 2)
{
std::cout << "Usage: " << argv[0] << " file.dem e.g. SainteHelens.dem"
<< std::endl;
return EXIT_FAILURE;
}
// Create the RenderWindow, Renderer
//
vtkNew<vtkNamedColors> colors;
vtkNew<vtkRenderer> ren0;
ren0->SetViewport(0, 0, 1.0 / 3.0, 1);
ren0->SetBackground(colors->GetColor3d("Wheat").GetData());
vtkNew<vtkRenderer> ren1;
ren1->SetViewport(1.0 / 3.0, 0, 2.0 / 3.0, 1);
ren1->SetBackground(colors->GetColor3d("BurlyWood").GetData());
vtkNew<vtkRenderer> ren2;
ren2->SetViewport(2.0 / 3.0, 0, 1, 1);
ren2->SetBackground(colors->GetColor3d("Tan").GetData());
vtkNew<vtkRenderWindow> renderWindow;
renderWindow->SetSize(1200, 400);
renderWindow->AddRenderer(ren0);
renderWindow->AddRenderer(ren1);
renderWindow->AddRenderer(ren2);
renderWindow->SetWindowName("FitToHeightMap");
vtkNew<vtkRenderWindowInteractor> interactor;
interactor->SetRenderWindow(renderWindow);
// Create pipeline. Load terrain data.
//
vtkNew<vtkLookupTable> lut;
lut->SetHueRange(0.6, 0);
lut->SetSaturationRange(1.0, 0);
lut->SetValueRange(0.5, 1.0);
// Read the data: a height field results
vtkNew<vtkDEMReader> demReader;
demReader->SetFileName(argv[1]);
demReader->Update(); // Update so we can get bounds
vtkNew<vtkImageDataGeometryFilter> surface;
surface->SetInputConnection(demReader->GetOutputPort());
// Warp the surface in the vertical direction
vtkNew<vtkWarpScalar> warp;
warp->SetInputConnection(surface->GetOutputPort());
warp->SetScaleFactor(1);
warp->UseNormalOn();
warp->SetNormal(0, 0, 1);
warp->Update();
// Show the terrain
double lo = demReader->GetOutput()->GetScalarRange()[0];
double hi = demReader->GetOutput()->GetScalarRange()[1];
vtkNew<vtkPolyDataMapper> demMapper;
demMapper->SetInputConnection(warp->GetOutputPort());
demMapper->ScalarVisibilityOn();
demMapper->SetScalarRange(lo, hi);
demMapper->SetLookupTable(lut);
vtkNew<vtkActor> demActor;
demActor->SetMapper(demMapper);
// Create polygon(s) to fit. z-values should be height of DEM
// to accomodate ProbeFilter
double zLevel = demReader->GetOutput()->GetBounds()[5];
double* demBounds;
demBounds = demReader->GetOutput()->GetBounds();
vtkNew<vtkPlaneSource> plane;
plane->SetOrigin(demBounds[0], demBounds[2], zLevel);
plane->SetPoint1(demBounds[1], demBounds[2], zLevel);
plane->SetPoint2(demBounds[0], demBounds[3], zLevel);
plane->SetResolution(128, 128);
plane->Update();
// Get the scalrs from the DEM
vtkNew<vtkProbeFilter> probeDem;
probeDem->SetSourceData(demReader->GetOutput());
probeDem->SetInputConnection(plane->GetOutputPort());
probeDem->Update();
// Fit polygons to surface using two strategies
// Both will share the same lookup tables
vtkNew<vtkFitToHeightMapFilter> pointFit;
pointFit->SetInputConnection(probeDem->GetOutputPort());
pointFit->SetHeightMapConnection(demReader->GetOutputPort());
pointFit->SetFittingStrategyToPointProjection();
pointFit->UseHeightMapOffsetOn();
vtkNew<vtkPolyDataMapper> pointMapper;
pointMapper->SetInputConnection(pointFit->GetOutputPort());
pointMapper->ScalarVisibilityOn();
pointMapper->SetScalarRange(lo, hi);
pointMapper->SetLookupTable(lut);
vtkNew<vtkActor> pointActor;
pointActor->SetMapper(pointMapper);
// Fit polygons to surface (cell strategy)
vtkNew<vtkFitToHeightMapFilter> cellFit;
cellFit->SetInputConnection(probeDem->GetOutputPort());
cellFit->SetHeightMapConnection(demReader->GetOutputPort());
cellFit->SetFittingStrategyToCellAverageHeight();
cellFit->UseHeightMapOffsetOn();
vtkNew<vtkPolyDataMapper> cellMapper;
cellMapper->SetInputConnection(cellFit->GetOutputPort());
cellMapper->ScalarVisibilityOn();
cellMapper->SetScalarRange(lo, hi);
cellMapper->SetLookupTable(lut);
vtkNew<vtkActor> cellActor;
cellActor->SetMapper(cellMapper);
// Render the three representations
ren0->AddActor(demActor);
ren1->AddActor(pointActor);
ren2->AddActor(cellActor);
// Look down the x axis
ren0->GetActiveCamera()->SetPosition(1, 0, 0);
ren0->GetActiveCamera()->SetFocalPoint(0, 1, 0);
ren0->GetActiveCamera()->SetViewUp(0, 0, 1);
ren0->ResetCamera();
// Rotate to an oblique view
ren0->GetActiveCamera()->Azimuth(30.0);
ren0->GetActiveCamera()->Elevation(60.0);
// Share the cameras
ren1->SetActiveCamera(ren0->GetActiveCamera());
ren2->SetActiveCamera(ren0->GetActiveCamera());
renderWindow->Render();
interactor->Start();
return EXIT_SUCCESS;
}
CMakeLists.txt¶
cmake_minimum_required(VERSION 3.12 FATAL_ERROR)
project(FitToHeightMap)
find_package(VTK COMPONENTS
CommonColor
CommonCore
CommonDataModel
FiltersCore
FiltersGeneral
FiltersGeometry
FiltersModeling
FiltersSources
IOImage
InteractionStyle
RenderingContextOpenGL2
RenderingCore
RenderingFreeType
RenderingGL2PSOpenGL2
RenderingOpenGL2
)
if (NOT VTK_FOUND)
message(FATAL_ERROR "FitToHeightMap: Unable to find the VTK build folder.")
endif()
# Prevent a "command line is too long" failure in Windows.
set(CMAKE_NINJA_FORCE_RESPONSE_FILE "ON" CACHE BOOL "Force Ninja to use response files.")
add_executable(FitToHeightMap MACOSX_BUNDLE FitToHeightMap.cxx )
target_link_libraries(FitToHeightMap PRIVATE ${VTK_LIBRARIES}
)
# vtk_module_autoinit is needed
vtk_module_autoinit(
TARGETS FitToHeightMap
MODULES ${VTK_LIBRARIES}
)
Download and Build FitToHeightMap¶
Click here to download FitToHeightMap and its CMakeLists.txt file. Once the tarball FitToHeightMap.tar has been downloaded and extracted,
cd FitToHeightMap/build
If VTK is installed:
cmake ..
If VTK is not installed but compiled on your system, you will need to specify the path to your VTK build:
cmake -DVTK_DIR:PATH=/home/me/vtk_build ..
Build the project:
make
and run it:
./FitToHeightMap
WINDOWS USERS
Be sure to add the VTK bin directory to your path. This will resolve the VTK dll's at run time.