OrientedBoundingCylinder
vtk-examples/Cxx/PolyData/OrientedBoundingCylinder
Description¶
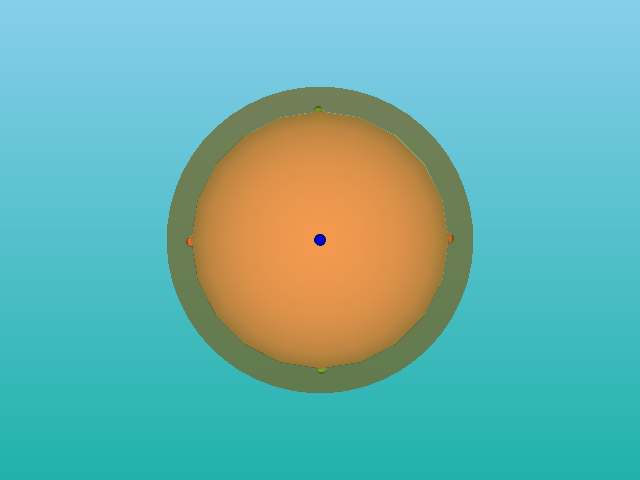
This example creates an oriented cylinder that encloses a vtkPolyData. The axis of the cylinder is aligned with the longest axis of the vtkPolyData.
The example proceeds as follow:
- A vtkOBBTree creates an oriented bounding box. The z dimension of the box is aligned with the longest axis.
- A vtkQuad finds the center of each face of the bounding box.
- A vtkLineSource creates a line from the centers of the long axis faces.
- vtkTubeFilter creates a "cylinder" from the lines with a radius equal to the an inner circle of bounding box.
- vtkExtractEnclosedPoints determines if there are points outside the initial guess.
- If there are points outside, the example does a linear search from the initial radius to the outer circle.
Question
If you have a question about this example, please use the VTK Discourse Forum
Code¶
OrientedBoundingCylinder.cxx
#include <vtkActor.h>
#include <vtkCleanPolyData.h>
#include <vtkExtractEnclosedPoints.h>
#include <vtkLineSource.h>
#include <vtkNamedColors.h>
#include <vtkNew.h>
#include <vtkOBBTree.h>
#include <vtkPoints.h>
#include <vtkPolyDataMapper.h>
#include <vtkProperty.h>
#include <vtkQuad.h>
#include <vtkRenderWindow.h>
#include <vtkRenderWindowInteractor.h>
#include <vtkRenderer.h>
#include <vtkSmartPointer.h>
#include <vtkTubeFilter.h>
// Readers
#include <vtkBYUReader.h>
#include <vtkOBJReader.h>
#include <vtkPLYReader.h>
#include <vtkPolyDataReader.h>
#include <vtkSTLReader.h>
#include <vtkXMLPolyDataReader.h>
#include <vtkPolyData.h>
#include <vtkSphereSource.h>
#include <array>
#include <cctype> // For to_lower
#include <cstdlib>
#include <iostream>
#include <string> // For find_last_of()
namespace {
vtkSmartPointer<vtkPolyData> ReadPolyData(std::string const& fileName);
double MakeAQuad(std::vector<std::array<double, 3>>&, std::array<double, 3>&);
} // namespace
int main(int argc, char* argv[])
{
auto polyData = ReadPolyData(argc > 1 ? argv[1] : "");
;
// Get bounds of polydata.
std::array<double, 6> bounds;
polyData->GetBounds(bounds.data());
// Create the tree.
vtkNew<vtkOBBTree> obbTree;
obbTree->SetDataSet(polyData);
obbTree->SetMaxLevel(1);
obbTree->BuildLocator();
// Get the PolyData for the OBB.
vtkNew<vtkPolyData> obbPolydata;
obbTree->GenerateRepresentation(0, obbPolydata);
// Get the points of the OBB.
vtkNew<vtkPoints> obbPoints;
obbPoints->DeepCopy(obbPolydata->GetPoints());
// Use a quad to find centers of OBB faces.
vtkNew<vtkQuad> aQuad;
std::vector<std::array<double, 3>> facePoints(4);
std::vector<std::array<double, 3>> centers(3);
std::vector<std::array<double, 3>> endPoints(3);
std::array<double, 3> center;
std::array<double, 3> endPoint;
std::array<double, 3> point0, point1, point2, point3, point4, point5, point6,
point7;
std::array<double, 3> radii;
std::array<double, 3> lengths;
// Transfer the points to std::array's.
obbPoints->GetPoint(0, point0.data());
obbPoints->GetPoint(1, point1.data());
obbPoints->GetPoint(2, point2.data());
obbPoints->GetPoint(3, point3.data());
obbPoints->GetPoint(4, point4.data());
obbPoints->GetPoint(5, point5.data());
obbPoints->GetPoint(6, point6.data());
obbPoints->GetPoint(7, point7.data());
// x face.
// ids[0] = 2; ids[1] = 3; ids[2] = 7; ids[3] = 6;
facePoints[0] = point2;
facePoints[1] = point3;
facePoints[2] = point7;
facePoints[3] = point6;
radii[0] = MakeAQuad(facePoints, centers[0]);
MakeAQuad(facePoints, centers[0]);
// ids[0] = 0; ids[1] = 4; ids[2] = 5; ids[3] = 1;
facePoints[0] = point0;
facePoints[1] = point4;
facePoints[2] = point5;
facePoints[3] = point1;
MakeAQuad(facePoints, endPoints[0]);
lengths[0] = std::sqrt(vtkMath::Distance2BetweenPoints(centers[0].data(),
endPoints[0].data())) /
2.0;
// y face.
// ids[0] = 0; ids[1] = 1; ids[2] = 2; ids[3] = 3;
facePoints[0] = point0;
facePoints[1] = point1;
facePoints[2] = point2;
facePoints[3] = point3;
radii[1] = MakeAQuad(facePoints, centers[1]);
// ids[0] = 4; ids[1] = 6; ids[2] = 7; ids[3] = 5;
facePoints[0] = point4;
facePoints[1] = point6;
facePoints[2] = point7;
facePoints[3] = point5;
MakeAQuad(facePoints, endPoints[1]);
lengths[1] = std::sqrt(vtkMath::Distance2BetweenPoints(centers[1].data(),
endPoints[1].data())) /
2.0;
// z face.
// ids[0] = 0; ids[1] = 2; ids[2] = 6; ids[3] = 4;
facePoints[0] = point0;
facePoints[1] = point2;
facePoints[2] = point6;
facePoints[3] = point4;
MakeAQuad(facePoints, centers[2]);
radii[2] =
std::sqrt(vtkMath::Distance2BetweenPoints(point0.data(), point2.data())) /
2.0;
double outerRadius =
std::sqrt(vtkMath::Distance2BetweenPoints(point0.data(), point6.data())) /
2.0;
// ids[0] = 1; ids[1] = 3; ids[2] = 7; ids[3] = 5;
facePoints[0] = point1;
facePoints[1] = point5;
facePoints[2] = point7;
facePoints[3] = point3;
MakeAQuad(facePoints, endPoints[2]);
lengths[2] = std::sqrt(vtkMath::Distance2BetweenPoints(centers[2].data(),
endPoints[2].data())) /
2.0;
// Find long axis.
int longAxis = -1;
double length = VTK_DOUBLE_MIN;
for (auto i = 0; i < 3; ++i)
{
std::cout << "length: " << lengths[i] << std::endl;
if (lengths[i] > length)
{
length = lengths[i];
longAxis = i;
}
}
std::cout << "longAxis: " << longAxis << std::endl;
std::cout << "radii: ";
double radius = radii[longAxis];
for (auto& a : radii)
{
std::cout << a << ", ";
}
std::cout << std::endl;
std::cout << "radius: " << radius << std::endl;
std::cout << "outerRadius: " << outerRadius << std::endl;
center = centers[longAxis];
endPoint = endPoints[longAxis];
vtkNew<vtkNamedColors> colors;
vtkNew<vtkLineSource> lineSource;
lineSource->SetPoint1(center.data());
lineSource->SetPoint2(endPoint.data());
vtkNew<vtkTubeFilter> tube;
tube->SetInputConnection(lineSource->GetOutputPort());
tube->SetRadius(radius);
tube->SetNumberOfSides(51);
tube->CappingOn();
tube->Update();
// See if all points lie inside cylinder.
vtkNew<vtkCleanPolyData> clean;
clean->SetInputData(tube->GetOutput());
clean->Update();
vtkNew<vtkExtractEnclosedPoints> enclosedPoints;
enclosedPoints->SetSurfaceData(clean->GetOutput());
enclosedPoints->SetInputData(polyData);
enclosedPoints->SetTolerance(.0001);
enclosedPoints->GenerateOutliersOn();
enclosedPoints->CheckSurfaceOn();
enclosedPoints->Update();
std::cout << "polyData points: " << polyData->GetPoints()->GetNumberOfPoints()
<< " excluded points: "
<< enclosedPoints->GetOutput(1)->GetPoints()->GetNumberOfPoints()
<< std::endl;
vtkNew<vtkPolyDataMapper> repMapper;
repMapper->SetInputData(obbPolydata);
vtkNew<vtkActor> repActor;
repActor->SetMapper(repMapper);
repActor->GetProperty()->SetColor(colors->GetColor3d("peacock").GetData());
repActor->GetProperty()->SetOpacity(.6);
// Create a mapper and actor for the cylinder.
vtkNew<vtkPolyDataMapper> cylinderMapper;
cylinderMapper->SetInputConnection(tube->GetOutputPort());
vtkNew<vtkActor> cylinderActor;
cylinderActor->SetMapper(cylinderMapper);
cylinderActor->GetProperty()->SetColor(
colors->GetColor3d("banana").GetData());
cylinderActor->GetProperty()->SetOpacity(.5);
vtkNew<vtkPolyDataMapper> originalMapper;
originalMapper->SetInputData(polyData);
vtkNew<vtkActor> originalActor;
originalActor->SetMapper(originalMapper);
originalActor->GetProperty()->SetColor(
colors->GetColor3d("tomato").GetData());
// Create a renderer, render window, and interactor.
vtkNew<vtkRenderer> renderer;
renderer->UseHiddenLineRemovalOn();
// Display all centers and endpoints.
std::vector<vtkColor3d> cs;
cs.push_back(colors->GetColor3d("red"));
cs.push_back(colors->GetColor3d("green"));
cs.push_back(colors->GetColor3d("blue"));
for (auto i = 0; i < 3; ++i)
{
vtkNew<vtkSphereSource> ps1;
ps1->SetCenter(centers[i].data());
ps1->SetRadius(length * .04);
ps1->SetPhiResolution(21);
ps1->SetThetaResolution(41);
vtkNew<vtkPolyDataMapper> pm1;
pm1->SetInputConnection(ps1->GetOutputPort());
vtkNew<vtkActor> pa1;
pa1->GetProperty()->SetColor(cs[i].GetData());
pa1->GetProperty()->SetSpecularPower(50);
pa1->GetProperty()->SetSpecular(.4);
pa1->GetProperty()->SetDiffuse(.6);
pa1->SetMapper(pm1);
renderer->AddActor(pa1);
vtkNew<vtkSphereSource> ps2;
ps2->SetCenter(endPoints[i].data());
ps2->SetRadius(length * .04);
ps2->SetPhiResolution(21);
ps2->SetThetaResolution(41);
vtkNew<vtkPolyDataMapper> pm2;
pm2->SetInputConnection(ps2->GetOutputPort());
vtkNew<vtkActor> pa2;
pa2->GetProperty()->SetColor(cs[i].GetData());
pa2->SetMapper(pm2);
renderer->AddActor(pa2);
}
vtkNew<vtkRenderWindow> renderWindow;
renderWindow->AddRenderer(renderer);
renderWindow->SetWindowName("OrientedBoundingCylinder");
renderWindow->SetSize(640, 480);
vtkNew<vtkRenderWindowInteractor> renderWindowInteractor;
renderWindowInteractor->SetRenderWindow(renderWindow);
// Add the actors to the scene.
renderer->AddActor(originalActor);
renderer->AddActor(cylinderActor);
// renderer->AddActor(repActor);
renderer->GradientBackgroundOn();
renderer->SetBackground2(colors->GetColor3d("SkyBlue").GetData());
renderer->SetBackground(colors->GetColor3d("LightSeaGreen").GetData());
// double adjustedRadius = radius;
double adjustedIncr = (outerRadius - radius) / 20.0;
if (enclosedPoints->GetOutput(1)->GetPoints()->GetNumberOfPoints() > 4)
{
std::cout << "improving..." << std::endl;
for (double r = radius;
enclosedPoints->GetOutput(1)->GetPoints()->GetNumberOfPoints() > 4;
r += adjustedIncr)
{
tube->SetRadius(r);
tube->Update();
clean->Update();
enclosedPoints->Update();
if (enclosedPoints->GetOutput(1)->GetPoints() != nullptr)
{
std::cout << "r: " << r << std::endl;
std::cout
<< " excluded points: "
<< enclosedPoints->GetOutput(1)->GetPoints()->GetNumberOfPoints()
<< std::endl;
renderWindow->Render();
}
else
{
break;
}
}
}
// Render and interact.
renderWindowInteractor->Start();
return EXIT_SUCCESS;
}
namespace {
vtkSmartPointer<vtkPolyData> ReadPolyData(std::string const& fileName)
{
vtkSmartPointer<vtkPolyData> polyData;
std::string extension = "";
if (fileName.find_last_of(".") != std::string::npos)
{
extension = fileName.substr(fileName.find_last_of("."));
}
// Make the extension lowercase.
std::transform(extension.begin(), extension.end(), extension.begin(),
::tolower);
if (extension == ".ply")
{
vtkNew<vtkPLYReader> reader;
reader->SetFileName(fileName.c_str());
reader->Update();
polyData = reader->GetOutput();
}
else if (extension == ".vtp")
{
vtkNew<vtkXMLPolyDataReader> reader;
reader->SetFileName(fileName.c_str());
reader->Update();
polyData = reader->GetOutput();
}
else if (extension == ".obj")
{
vtkNew<vtkOBJReader> reader;
reader->SetFileName(fileName.c_str());
reader->Update();
polyData = reader->GetOutput();
}
else if (extension == ".stl")
{
vtkNew<vtkSTLReader> reader;
reader->SetFileName(fileName.c_str());
reader->Update();
polyData = reader->GetOutput();
}
else if (extension == ".vtk")
{
vtkNew<vtkPolyDataReader> reader;
reader->SetFileName(fileName.c_str());
reader->Update();
polyData = reader->GetOutput();
}
else if (extension == ".g")
{
vtkNew<vtkBYUReader> reader;
reader->SetGeometryFileName(fileName.c_str());
reader->Update();
polyData = reader->GetOutput();
}
else
{
// Return a polydata sphere if the extension is unknown.
vtkNew<vtkSphereSource> source;
source->SetThetaResolution(20);
source->SetPhiResolution(11);
source->Update();
polyData = source->GetOutput();
}
return polyData;
}
double MakeAQuad(std::vector<std::array<double, 3>>& points,
std::array<double, 3>& center)
{
vtkNew<vtkQuad> aQuad;
aQuad->GetPoints()->SetPoint(0, points[0].data());
aQuad->GetPoints()->SetPoint(1, points[1].data());
aQuad->GetPoints()->SetPoint(2, points[2].data());
aQuad->GetPoints()->SetPoint(3, points[3].data());
aQuad->GetPointIds()->SetId(0, 0);
aQuad->GetPointIds()->SetId(1, 1);
aQuad->GetPointIds()->SetId(2, 2);
aQuad->GetPointIds()->SetId(3, 3);
std::array<double, 3> pcenter;
pcenter[0] = pcenter[1] = pcenter[2] = -12345.0;
aQuad->GetParametricCenter(pcenter.data());
std::vector<double> cweights(aQuad->GetNumberOfPoints());
int pSubId = 0;
aQuad->EvaluateLocation(pSubId, pcenter.data(), center.data(),
&(*cweights.begin()));
std::cout << "center: ";
for (auto& a : center)
{
std::cout << a << ", ";
}
std::cout << std::endl;
return std::sqrt(aQuad->GetLength2()) / 2.0;
}
} // namespace
CMakeLists.txt¶
cmake_minimum_required(VERSION 3.12 FATAL_ERROR)
project(OrientedBoundingCylinder)
find_package(VTK COMPONENTS
CommonColor
CommonCore
CommonDataModel
FiltersCore
FiltersGeneral
FiltersPoints
FiltersSources
IOGeometry
IOLegacy
IOPLY
IOXML
InteractionStyle
RenderingContextOpenGL2
RenderingCore
RenderingFreeType
RenderingGL2PSOpenGL2
RenderingOpenGL2
)
if (NOT VTK_FOUND)
message(FATAL_ERROR "OrientedBoundingCylinder: Unable to find the VTK build folder.")
endif()
# Prevent a "command line is too long" failure in Windows.
set(CMAKE_NINJA_FORCE_RESPONSE_FILE "ON" CACHE BOOL "Force Ninja to use response files.")
add_executable(OrientedBoundingCylinder MACOSX_BUNDLE OrientedBoundingCylinder.cxx )
target_link_libraries(OrientedBoundingCylinder PRIVATE ${VTK_LIBRARIES}
)
# vtk_module_autoinit is needed
vtk_module_autoinit(
TARGETS OrientedBoundingCylinder
MODULES ${VTK_LIBRARIES}
)
Download and Build OrientedBoundingCylinder¶
Click here to download OrientedBoundingCylinder and its CMakeLists.txt file. Once the tarball OrientedBoundingCylinder.tar has been downloaded and extracted,
cd OrientedBoundingCylinder/build
If VTK is installed:
cmake ..
If VTK is not installed but compiled on your system, you will need to specify the path to your VTK build:
cmake -DVTK_DIR:PATH=/home/me/vtk_build ..
Build the project:
make
and run it:
./OrientedBoundingCylinder
WINDOWS USERS
Be sure to add the VTK bin directory to your path. This will resolve the VTK dll's at run time.