AlignTwoPolyDatas
vtk-examples/Python/PolyData/AlignTwoPolyDatas
Description¶
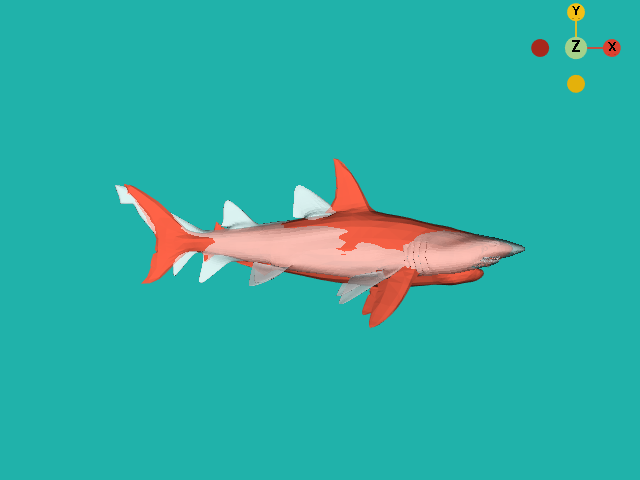
This example shows how to align two vtkPolyData's. Typically, the two datasets are related. For example, aligning a CT head isosurface with an MRI head isosurface of the same patient. Or two steps in a time series of an evolving surface. These cases usually reside in the same coordinate system, and the initial alignment is "close" to the desired results.
Another case is when the two datasets are from the "same" family of objects - for example, running the example with two types of sharks that exist in different coordinate systems.
The algorithm proceeds as follows:
-
Read the two vtkPolyData's that exist in the example's command line. The first file contains the source vtkPolyData to be aligned with the second file's vtkPolyData called the target. Another naming convention is moving and fixed.
-
Compute a measure of fit of the two original files. We use the recently added vtkHausdorffDistancePointSetFilter to compute the measure. See Hausdorff Distance.
-
Align the bounding boxes of the two datasets. Here we use a vtkOBBTree locator to create oriented bounding boxes. See Oriented Bounding Boxes. Use the bounding box corner coordinates to create source and target vtkLandmarkTransform's. vtkTransformPolyData uses this transform to create a new source vtkPolyData. Since the orientations of the bounding boxes may differ, the AlignBoundingBoxes function tries ten different rotations. For each rotation, it computes the Hausdorff distance between the target's OBB corners and the transformed source's OBB corners. Finally, transform the original source using the smallest distance.
-
Improve the alignment with vtkIterativeClosestPointTransform with a RigidBody transform. Compute the distance metric again.
-
Display the source and target vtkPolyData's with the transform that has the best distance metric.
Info
The example is run with src/Testing/Data/thingiverse/Grey_Nurse_Shark.stl and src/Testing/Data/greatWhite.stl, in this case, we reorient the target using a rotation. vtkTransformPolyDataFilter is used to get a better fit in this case.
Info
If example is run with src/Testing/Data/thingiverse/Grey_Nurse_Shark.stl and src/Testing/Data/shark.ply the fit is really poor and the Iterative Closest Point algotithm fails. So we fallback and use oriented bounding boxes.
Other languages
See (Cxx)
Question
If you have a question about this example, please use the VTK Discourse Forum
Code¶
AlignTwoPolyDatas.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import math
from pathlib import Path
# noinspection PyUnresolvedReferences
import vtkmodules.vtkInteractionStyle
# noinspection PyUnresolvedReferences
import vtkmodules.vtkRenderingOpenGL2
from vtkmodules.vtkCommonColor import vtkNamedColors
from vtkmodules.vtkCommonCore import (
VTK_DOUBLE_MAX,
vtkPoints
)
from vtkmodules.vtkCommonCore import (
VTK_VERSION_NUMBER,
vtkVersion
)
from vtkmodules.vtkCommonDataModel import (
vtkIterativeClosestPointTransform,
vtkPolyData
)
from vtkmodules.vtkCommonTransforms import (
vtkLandmarkTransform,
vtkTransform
)
from vtkmodules.vtkFiltersGeneral import (
vtkOBBTree,
vtkTransformPolyDataFilter
)
from vtkmodules.vtkFiltersModeling import vtkHausdorffDistancePointSetFilter
from vtkmodules.vtkIOGeometry import (
vtkBYUReader,
vtkOBJReader,
vtkSTLReader
)
from vtkmodules.vtkIOLegacy import (
vtkPolyDataReader,
vtkPolyDataWriter
)
from vtkmodules.vtkIOPLY import vtkPLYReader
from vtkmodules.vtkIOXML import vtkXMLPolyDataReader
from vtkmodules.vtkInteractionWidgets import (
vtkCameraOrientationWidget,
vtkOrientationMarkerWidget
)
from vtkmodules.vtkRenderingAnnotation import vtkAxesActor
from vtkmodules.vtkRenderingCore import (
vtkActor,
vtkDataSetMapper,
vtkRenderWindow,
vtkRenderWindowInteractor,
vtkRenderer
)
def get_program_parameters():
import argparse
description = 'How to align two vtkPolyData\'s.'
epilogue = '''
'''
parser = argparse.ArgumentParser(description=description, epilog=epilogue,
formatter_class=argparse.RawTextHelpFormatter)
parser.add_argument('src_fn', help='The polydata source file name,e.g. thingiverse/Grey_Nurse_Shark.stl.')
parser.add_argument('tgt_fn', help='The polydata target file name, e.g. greatWhite.stl.')
args = parser.parse_args()
return args.src_fn, args.tgt_fn
def main():
colors = vtkNamedColors()
src_fn, tgt_fn = get_program_parameters()
print('Loading source:', src_fn)
source_polydata = read_poly_data(src_fn)
# Save the source polydata in case the alignment process does not improve
# segmentation.
original_source_polydata = vtkPolyData()
original_source_polydata.DeepCopy(source_polydata)
print('Loading target:', tgt_fn)
target_polydata = read_poly_data(tgt_fn)
# If the target orientation is markedly different, you may need to apply a
# transform to orient the target with the source.
# For example, when using Grey_Nurse_Shark.stl as the source and
# greatWhite.stl as the target, you need to transform the target.
trnf = vtkTransform()
if Path(src_fn).name == 'Grey_Nurse_Shark.stl' and Path(tgt_fn).name == 'greatWhite.stl':
trnf.RotateY(90)
tpd = vtkTransformPolyDataFilter()
tpd.SetTransform(trnf)
tpd.SetInputData(target_polydata)
tpd.Update()
renderer = vtkRenderer()
render_window = vtkRenderWindow()
render_window.AddRenderer(renderer)
interactor = vtkRenderWindowInteractor()
interactor.SetRenderWindow(render_window)
distance = vtkHausdorffDistancePointSetFilter()
distance.SetInputData(0, tpd.GetOutput())
distance.SetInputData(1, source_polydata)
distance.Update()
distance_before_align = distance.GetOutput(0).GetFieldData().GetArray('HausdorffDistance').GetComponent(0, 0)
# Get initial alignment using oriented bounding boxes.
align_bounding_boxes(source_polydata, tpd.GetOutput())
distance.SetInputData(0, tpd.GetOutput())
distance.SetInputData(1, source_polydata)
distance.Modified()
distance.Update()
distance_after_align = distance.GetOutput(0).GetFieldData().GetArray('HausdorffDistance').GetComponent(0, 0)
best_distance = min(distance_before_align, distance_after_align)
if distance_after_align > distance_before_align:
source_polydata.DeepCopy(original_source_polydata)
# Refine the alignment using IterativeClosestPoint.
icp = vtkIterativeClosestPointTransform()
icp.SetSource(source_polydata)
icp.SetTarget(tpd.GetOutput())
icp.GetLandmarkTransform().SetModeToRigidBody()
icp.SetMaximumNumberOfLandmarks(100)
icp.SetMaximumMeanDistance(.00001)
icp.SetMaximumNumberOfIterations(500)
icp.CheckMeanDistanceOn()
icp.StartByMatchingCentroidsOn()
icp.Update()
icp_mean_distance = icp.GetMeanDistance()
# print(icp)
lm_transform = icp.GetLandmarkTransform()
transform = vtkTransformPolyDataFilter()
transform.SetInputData(source_polydata)
transform.SetTransform(lm_transform)
transform.SetTransform(icp)
transform.Update()
distance.SetInputData(0, tpd.GetOutput())
distance.SetInputData(1, transform.GetOutput())
distance.Update()
# Note: If there is an error extracting eigenfunctions, then this will be zero.
distance_after_icp = distance.GetOutput(0).GetFieldData().GetArray('HausdorffDistance').GetComponent(0, 0)
# Check if ICP worked.
if not (math.isnan(icp_mean_distance) or math.isinf(icp_mean_distance)):
if distance_after_icp < best_distance:
best_distance = distance_after_icp
print('Distances:')
print(' Before aligning: {:0.5f}'.format(distance_before_align))
print(' Aligning using oriented bounding boxes: {:0.5f}'.format(distance_before_align))
print(' Aligning using IterativeClosestPoint: {:0.5f}'.format(distance_after_icp))
print(' Best distance: {:0.5f}'.format(best_distance))
# Select the source to use.
source_mapper = vtkDataSetMapper()
if best_distance == distance_before_align:
source_mapper.SetInputData(original_source_polydata)
print('Using original alignment')
elif best_distance == distance_after_align:
source_mapper.SetInputData(source_polydata)
print('Using alignment by OBB')
else:
source_mapper.SetInputConnection(transform.GetOutputPort())
print('Using alignment by ICP')
source_mapper.ScalarVisibilityOff()
writer = vtkPolyDataWriter()
if best_distance == distance_before_align:
writer.SetInputData(original_source_polydata)
elif best_distance == distance_after_align:
writer.SetInputData(source_polydata)
else:
writer.SetInputData(transform.GetOutput())
writer.SetFileName('AlignedSource.vtk')
writer.Write()
writer.SetInputData(tpd.GetOutput())
writer.SetFileName('Target.vtk')
writer.Write()
source_actor = vtkActor()
source_actor.SetMapper(source_mapper)
source_actor.GetProperty().SetOpacity(0.6)
source_actor.GetProperty().SetDiffuseColor(
colors.GetColor3d('White'))
renderer.AddActor(source_actor)
target_mapper = vtkDataSetMapper()
target_mapper.SetInputData(tpd.GetOutput())
target_mapper.ScalarVisibilityOff()
target_actor = vtkActor()
target_actor.SetMapper(target_mapper)
target_actor.GetProperty().SetDiffuseColor(
colors.GetColor3d('Tomato'))
renderer.AddActor(target_actor)
render_window.AddRenderer(renderer)
renderer.SetBackground(colors.GetColor3d("sea_green_light"))
renderer.UseHiddenLineRemovalOn()
if vtk_version_ok(9, 0, 20210718):
try:
cam_orient_manipulator = vtkCameraOrientationWidget()
cam_orient_manipulator.SetParentRenderer(renderer)
# Enable the widget.
cam_orient_manipulator.On()
except AttributeError:
pass
else:
axes = vtkAxesActor()
widget = vtkOrientationMarkerWidget()
rgba = [0.0, 0.0, 0.0, 0.0]
colors.GetColor("Carrot", rgba)
widget.SetOutlineColor(rgba[0], rgba[1], rgba[2])
widget.SetOrientationMarker(axes)
widget.SetInteractor(interactor)
widget.SetViewport(0.0, 0.0, 0.2, 0.2)
widget.EnabledOn()
widget.InteractiveOn()
render_window.SetSize(640, 480)
render_window.Render()
render_window.SetWindowName('AlignTwoPolyDatas')
interactor.Start()
def vtk_version_ok(major, minor, build):
"""
Check the VTK version.
:param major: Major version.
:param minor: Minor version.
:param build: Build version.
:return: True if the requested VTK version is greater or equal to the actual VTK version.
"""
needed_version = 10000000000 * int(major) + 100000000 * int(minor) + int(build)
try:
vtk_version_number = VTK_VERSION_NUMBER
except AttributeError: # as error:
ver = vtkVersion()
vtk_version_number = 10000000000 * ver.GetVTKMajorVersion() + 100000000 * ver.GetVTKMinorVersion() \
+ ver.GetVTKBuildVersion()
if vtk_version_number >= needed_version:
return True
else:
return False
def read_poly_data(file_name):
import os
path, extension = os.path.splitext(file_name)
extension = extension.lower()
if extension == ".ply":
reader = vtkPLYReader()
reader.SetFileName(file_name)
reader.Update()
poly_data = reader.GetOutput()
elif extension == ".vtp":
reader = vtkXMLPolyDataReader()
reader.SetFileName(file_name)
reader.Update()
poly_data = reader.GetOutput()
elif extension == ".obj":
reader = vtkOBJReader()
reader.SetFileName(file_name)
reader.Update()
poly_data = reader.GetOutput()
elif extension == ".stl":
reader = vtkSTLReader()
reader.SetFileName(file_name)
reader.Update()
poly_data = reader.GetOutput()
elif extension == ".vtk":
reader = vtkPolyDataReader()
reader.SetFileName(file_name)
reader.Update()
poly_data = reader.GetOutput()
elif extension == ".g":
reader = vtkBYUReader()
reader.SetGeometryFileName(file_name)
reader.Update()
poly_data = reader.GetOutput()
else:
# Return a None if the extension is unknown.
poly_data = None
return poly_data
def align_bounding_boxes(source, target):
# Use OBBTree to create an oriented bounding box for target and source
source_obb_tree = vtkOBBTree()
source_obb_tree.SetDataSet(source)
source_obb_tree.SetMaxLevel(1)
source_obb_tree.BuildLocator()
target_obb_tree = vtkOBBTree()
target_obb_tree.SetDataSet(target)
target_obb_tree.SetMaxLevel(1)
target_obb_tree.BuildLocator()
source_landmarks = vtkPolyData()
source_obb_tree.GenerateRepresentation(0, source_landmarks)
target_landmarks = vtkPolyData()
target_obb_tree.GenerateRepresentation(0, target_landmarks)
lm_transform = vtkLandmarkTransform()
lm_transform.SetModeToSimilarity()
lm_transform.SetTargetLandmarks(target_landmarks.GetPoints())
best_distance = VTK_DOUBLE_MAX
best_points = vtkPoints()
best_distance = best_bounding_box(
"X",
target,
source,
target_landmarks,
source_landmarks,
best_distance,
best_points)
best_distance = best_bounding_box(
"Y",
target,
source,
target_landmarks,
source_landmarks,
best_distance,
best_points)
best_distance = best_bounding_box(
"Z",
target,
source,
target_landmarks,
source_landmarks,
best_distance,
best_points)
lm_transform.SetSourceLandmarks(best_points)
lm_transform.Modified()
lm_transform_pd = vtkTransformPolyDataFilter()
lm_transform_pd.SetInputData(source)
lm_transform_pd.SetTransform(lm_transform)
lm_transform_pd.Update()
source.DeepCopy(lm_transform_pd.GetOutput())
return
def best_bounding_box(axis, target, source, target_landmarks, source_landmarks, best_distance, best_points):
distance = vtkHausdorffDistancePointSetFilter()
test_transform = vtkTransform()
test_transform_pd = vtkTransformPolyDataFilter()
lm_transform = vtkLandmarkTransform()
lm_transform_pd = vtkTransformPolyDataFilter()
lm_transform.SetModeToSimilarity()
lm_transform.SetTargetLandmarks(target_landmarks.GetPoints())
source_center = source_landmarks.GetCenter()
delta = 90.0
for i in range(0, 4):
angle = delta * i
# Rotate about center
test_transform.Identity()
test_transform.Translate(source_center[0], source_center[1], source_center[2])
if axis == "X":
test_transform.RotateX(angle)
elif axis == "Y":
test_transform.RotateY(angle)
else:
test_transform.RotateZ(angle)
test_transform.Translate(-source_center[0], -source_center[1], -source_center[2])
test_transform_pd.SetTransform(test_transform)
test_transform_pd.SetInputData(source_landmarks)
test_transform_pd.Update()
lm_transform.SetSourceLandmarks(test_transform_pd.GetOutput().GetPoints())
lm_transform.Modified()
lm_transform_pd.SetInputData(source)
lm_transform_pd.SetTransform(lm_transform)
lm_transform_pd.Update()
distance.SetInputData(0, target)
distance.SetInputData(1, lm_transform_pd.GetOutput())
distance.Update()
test_distance = distance.GetOutput(0).GetFieldData().GetArray("HausdorffDistance").GetComponent(0, 0)
if test_distance < best_distance:
best_distance = test_distance
best_points.DeepCopy(test_transform_pd.GetOutput().GetPoints())
return best_distance
if __name__ == '__main__':
main()